Product Promotion
0x5a.live
for different kinds of informations and explorations.
GitHub - adrielcafe/hal: 🔴 A non-deterministic finite-state machine for Android & JVM that won't let you down
🔴 A non-deterministic finite-state machine for Android & JVM that won't let you down - adrielcafe/hal
Visit SiteGitHub - adrielcafe/hal: 🔴 A non-deterministic finite-state machine for Android & JVM that won't let you down
🔴 A non-deterministic finite-state machine for Android & JVM that won't let you down - adrielcafe/hal
Powered by 0x5a.live 💗
![]()
![]()

![]()
![]()
![]()
![]()

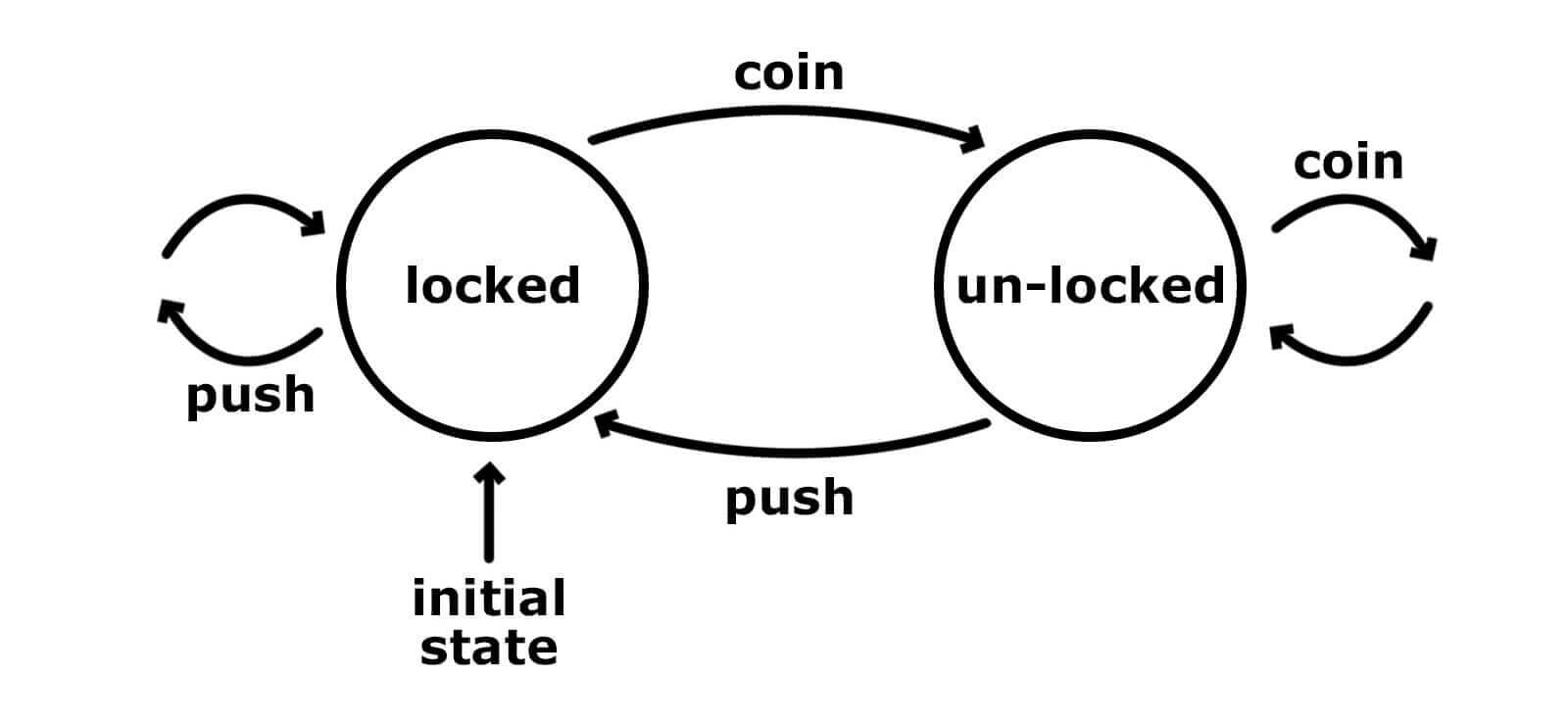
HAL is a non-deterministic finite-state machine for Android & JVM built with Coroutines StateFlow and LiveData.
Why non-deterministic?
Because in a non-deterministic finite-state machine, an action can lead to one, more than one, or no transition for a given state. That way we have more flexibility to handle any kind of scenario.
Use cases:
- InsertCoin
transition toUnlocked - LoadPosts
transition toLoading thentransition toSuccess or Error - LogMessage
don't transition
Why HAL?
It's a tribute to HAL 9000 (Heuristically programmed ALgorithmic computer), the sentient computer that controls the systems of the Discovery One spacecraft.
This project started as a library module in one of my personal projects, but I decided to open source it and add more features for general use. Hope you like!
Usage
First, declare your Actions and States. They must implement HAL.Action and HAL.State respectively.
sealed class MyAction : HAL.Action {
object LoadPosts : MyAction()
data class AddPost(val post: Post) : MyAction()
}
sealed class MyState : HAL.State {
object Init : MyState()
object Loading : MyState()
data class PostsLoaded(val posts: List<Post>) : MyState()
data class Error(val message: String) : MyState()
}
Next, implement the HAL.StateMachine<YourAction, YourState> interface in your ViewModel, Presenter, Controller or similar.
The HAL class receives the following parameters:
- The initial state
- A
CoroutineScope(tip: use the built in viewModelScope) - An optional CoroutineDispatcher to run the reducer function (default is Dispatcher.DEFAULT)
- A reducer function,
suspend (action: A, state: S) -> Unit, where:suspend: the reducer runs inside aCoroutineScope, so you can run IO and other complex tasks without worrying about block the Main Threadaction: A: the action emitted to the state machinestate: S: the current state of the state machine
You should handle all actions inside the reducer function. Call transitionTo(newState) or simply +newState whenever you need to change the state (it can be called multiple times).
class MyViewModel(private val postRepository: PostRepository) : ViewModel(), HAL.StateMachine<MyAction, MyState> {
override val stateMachine by HAL(MyState.Init, viewModelScope) { action, state ->
when (action) {
is MyAction.LoadPosts -> {
+MyState.Loading
try {
// You can run suspend functions without blocking the Main Thread
val posts = postRepository.getPosts()
// And emit multiple states per action
+MyState.PostsLoaded(posts)
} catch(e: Exception) {
+MyState.Error("Ops, something went wrong.")
}
}
is MyAction.AddPost -> {
/* Handle action */
}
}
}
}
Finally, choose a class to emit actions to your state machine and observe state changes, it can be an Activity, Fragment, View or any other class.
class MyActivity : AppCompatActivity() {
private val viewModel by viewModels<MyViewModel>()
override fun onCreate(savedInstanceState: Bundle?) {
// Easily emit actions to your State Machine
// You can all use: viewModel.emit(MyAction.LoadPosts)
loadPostsBt.setOnClickListener {
viewModel += MyAction.LoadPosts
}
// Observe and handle state changes
viewModel.observeState(lifecycleScope) { state ->
when (state) {
is MyState.Init -> showWelcomeMessage()
is MyState.Loading -> showLoading()
is MyState.PostsLoaded -> showPosts(state.posts)
is MyState.Error -> showError(state.message)
}
}
}
}
If you want to use a LiveData-based state observer, just pass your LifecycleOwner to observeState(), otherwise HAL will use the default Flow-based state observer.
// Observe and handle state changes backed by LiveData
viewModel.observeState(lifecycleOwner) { state ->
// Handle state
}
Single source of truth
Do you like the idea of have a single source of truth, like the Model in The Elm Architecture or the Store in Redux? I have good news: you can do the same with HAL!
Instead of use a sealed class with multiple states just create a single data class to represent your entire state:
sealed class MyAction : HAL.Action {
// Declare your actions as usual
}
// Tip: use default parameters to represent your initial state
data class MyState(
val posts: List<Post> = emptyList(),
val loading: Boolean = false,
val error: String? = null
) : HAL.State
Now, when handling the emitted actions use state.copy() to change your state:
override val stateMachine by HAL(MyState(), viewModelScope) { action, state ->
when (action) {
is NetworkAction.LoadPosts -> {
+state.copy(loading = true)
try {
val posts = postRepository.getPosts()
+state.copy(posts = posts)
} catch (e: Throwable) {
+state.copy(error = "Ops, something went wrong.")
}
}
is MyAction.AddPost -> {
/* Handle action */
}
}
}
And finally you can handle the state as a single source of truth:
viewModel.observeState(lifecycleScope) { state ->
showPosts(state.posts)
setLoading(state.loading)
state.error?.let(::showError)
}
Custom StateObserver
If needed, you can also create your custom state observer by implementing the StateObserver<S> interface:
class MyCustomStateObserver<S : HAL.State>(
private val myAwesomeParam: MyAwesomeClass
) : HAL.StateObserver<S> {
override fun observe(stateFlow: Flow<S>) {
// Handle the incoming states
}
}
And to use, just create an instance of it and pass to observeState() function:
viewModel.observeState(MyCustomStateObserver(myAwesomeParam))
Import to your project
- Add the JitPack repository in your root build.gradle at the end of repositories:
allprojects {
repositories {
maven { url 'https://jitpack.io' }
}
}
- Next, add the desired dependencies to your module:
dependencies {
// Core with Flow state observer
implementation "com.github.adrielcafe.hal:hal-core:$currentVersion"
// LiveData state observer only
implementation "com.github.adrielcafe.hal:hal-livedata:$currentVersion"
}
Current version: 
Platform compatibility
hal-core |
hal-livedata |
|
|---|---|---|
| Android | ✓ | ✓ |
| JVM | ✓ |
Kotlin Resources
are all listed below.
Made with ❤️
to provide different kinds of informations and resources.